Introduction

Inspiration and scope
Proceduralism is a very interesting topic in today’s world of modern CGI, a very fascinating trend that’s bringing us closer to an easier method to share our visions and emotions.
The main scope of my project was to demonstrate how we can create a set-piece that’s 80% or more completely procedural and with gaming utilization potential. Using only a concept, and storyboard to create an environment that can be changed at a whim and from which we can spawn different effects - able to cover different roles.
My inspiration for the project was the beautiful scadinanvian/icelandic landscape with a little bit of alien.
Techniques and solvers used
● Procedural modelling - all structures, vegetation, drones, wires, mountains
● Pyrosim and procedural generation for rolling fog, tertiary fog and clouds
● Particle logic for crowds, with sets of instructions for different times of day
● Vellum for grass and wires
● Timeshifting simulations for timelapse with dynamic behaviour patterns
● Houdini Engine for Unreal/Unity integration
● TOPs operator for rendering, and structure iterations
Challenges
● Scene scale related - geometry density, simulation scale, optimization
● Crowd related - avoidance of obstacles, climbing terrain, complex behaviour patterns
● Timelapse - timing of different simulations, sun position and color transition during day
● Clouds and other volumetric effects
● Look development using procedural elements
Storyboard
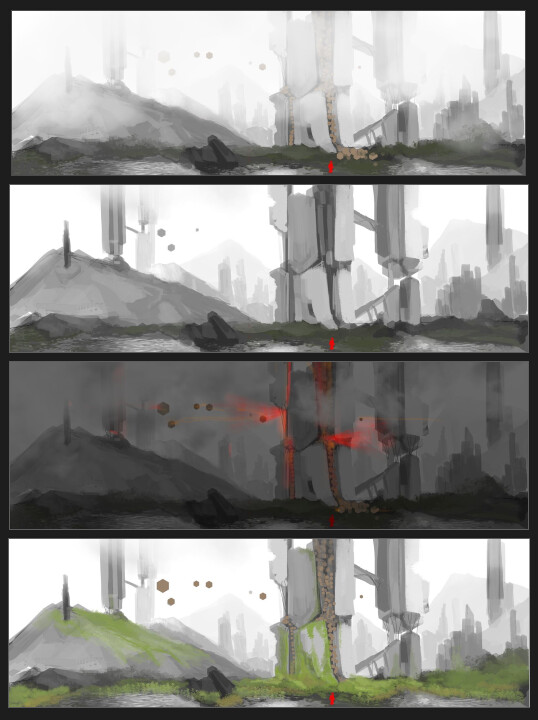
Landscape: black rock, hexagonal rock formations, crystalised/mossy formations with small a small flowing river
Weather: cloudy, neutral gray, foggy, sombre in the background
Mood: Oppressive, mystical and ominous
Procedural generation and Camera Culling
All the buildings are interconnected based on distance, and when they’re close enough they would generate wires between them and simulated using cloth physics/deformation such as vellum. This aspect was optimised based on camera distance, and only closer elements would be simulated making the scene a lot more fluid.

Elements such as mountains were done using heightfields on which everything is scattered on; for a more realistic feel I’ve used a feedback loop to raise the ground in areas were there are stones and buildings - creating a more believable connected environment.

"Heightfield for the backdrop, closer elements are converted to polygons with the texture attributes from the heightfield"
Crowd Simulation
Particles were used for the drone crowds, made using a point cloud to track the nearest building and climb. Some buildings were given higher value so they’re more incentivised, in this case the foreground building had the highest value due to artistic reasons. This simulation can then be used in soft body or hard body contexts such as vellum. In my sim, I chose not to use vellum because it would increase the sim cache size due to the amount of points and it would add minimal difference to the end result.

"Crowd movement, lanes were created using noise pattern"
Rolling fog and volumetrics
The rolling fog and tertiary fog layers were done procedurally based on peak heights, with RBD spheres to falling down the mountain sides. Spheres would create a trail that would then be used to emit smoke particles, due to the look of real life rolling fog - I had to make the ends get more narrow and the middle parts pop out more.
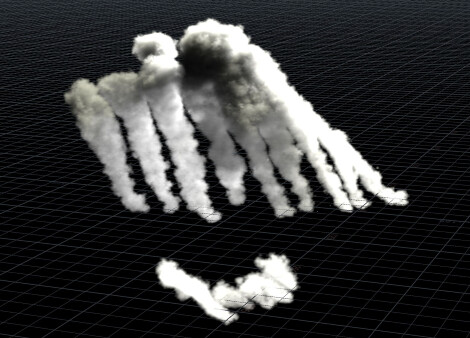
"Rolling fog generated based on peaks and attribute transfer from falling spheres"